V2VSL: Infrastructure-Free, Decentralized Variable Speed Limit Control
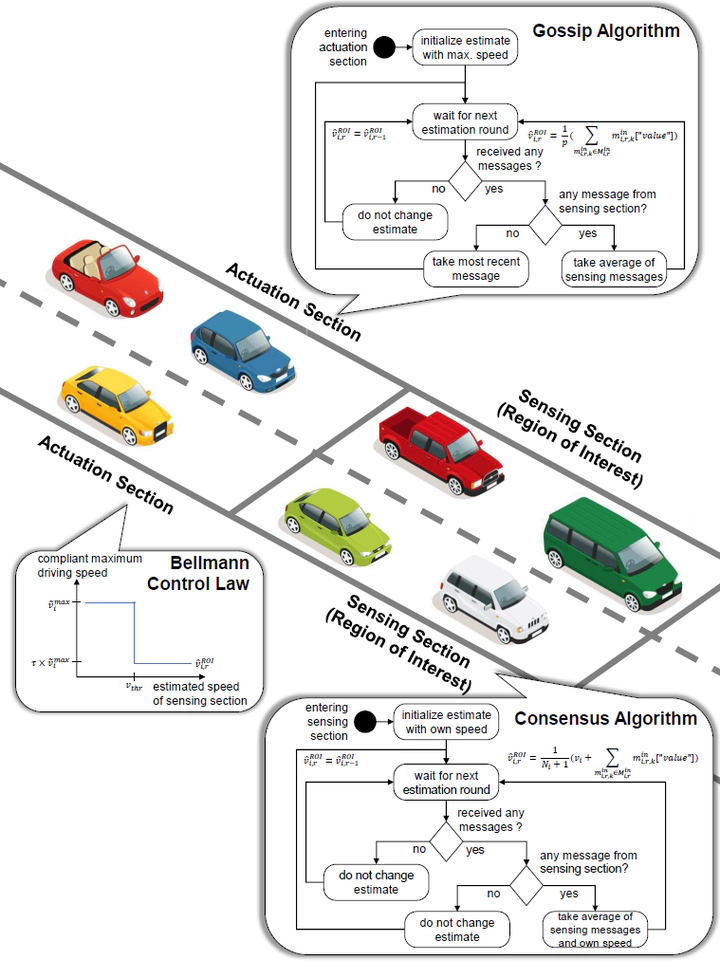 Image credit: Kevin Riehl
Image credit: Kevin RiehlAbstract
Traffic congestion is a pertinent issue on highways, with severe consequences on environment, economy, and quality of life. Variable speed limit control can help avoid traffic jams before congestion forms, as vehicles upstream are required to decelerate at times to stop emerging congestion from propagating and expanding. This work proposes a fully decentralized, model-free, and infrastructure-free approach to variable speed limit control – V2VSL – that employs connected vehicles as communication infrastructure, as moving sensors, and as actuators. Dedicated short range communication, consensus algorithm and gossip algorithm protocols, and a Bellman controller are components of this approach. At the example of three highway bottleneck scenarios, performance is assessed by traffic micro-simulations, that show the approach is robust to gaps between platoons and capable of recovering from periods of disconnection. The proposed method achieves significant improvements in traffic states, with up to 15% higher speeds, 5% lower density, and 8% higher flows. These traffic improvements become significant at a compliance rate as low as 25%, making the method potentially viable in near-term mixed traffic environments with partial CAV penetration. V2VSL achieves efficiency gains comparable to centralized VSL systems, but without requiring roadside infrastructure, detailed traffic models, or centralized communication. An open-source implementation and computational results are provided as SUMO simulation with Python on GitHub.
Kevin Riehl
Doctoral Researcher & Scientist
My name is Kevin Riehl, and I am a cosmopolitan, technology enthusiast and philantrop. I believe, that technology is the key to make the world a better place, and that learning, self-improvement, collaboration and criticial thinking are our duty as gifted minds.