Oriented Object Detection For Aerial Vehicle Trajectory Extraction
 Image credit: Kevin Riehl
Image credit: Kevin Riehl25th Swiss Transport Research Conference (STRC 2025), Ascona, Switzerland, May 14-16, 2025
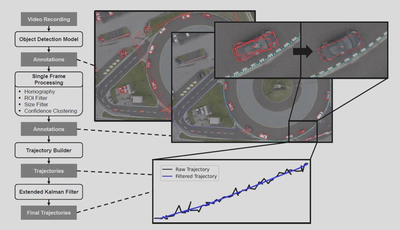
Vehicle trajectories offer valuable insights for a wide range of road transportation applications and research fields. A growing branch of literature explores vehicle trajectory extraction from aerial videos, where object detection using neural networks is an important component. Horizontal bounding box object detection struggles to differentiate well between rotated vehicles, especially when dealing with complex backgrounds or densely packed vehicles. In this work, we demonstrate how oriented object detection and the use of angular, directional information can be used to significantly improve the quality of extracted trajectories. The benchmark of 18 object detection models on a real world video dataset shows, that oriented object detection achieves 0.20m (15%) better internal, and 0.75m (20%) better platoon consistency; REDET and S2A from the openmmlab family count amongst the best performing detection models. Additionally, the analysis of synthetic trajectories with different levels of noise and coverage highlights, that improvements with angular information can be achieved when positional noise is high, coverage is low. At the presence of very noisy angular information however, these improvements diminish.
 |  |  |  |  |
Kevin Riehl
Doctoral Researcher & Scientist
My name is Kevin Riehl, and I am a cosmopolitan, technology enthusiast and philantrop. I believe, that technology is the key to make the world a better place, and that learning, self-improvement, collaboration and criticial thinking are our duty as gifted minds.